













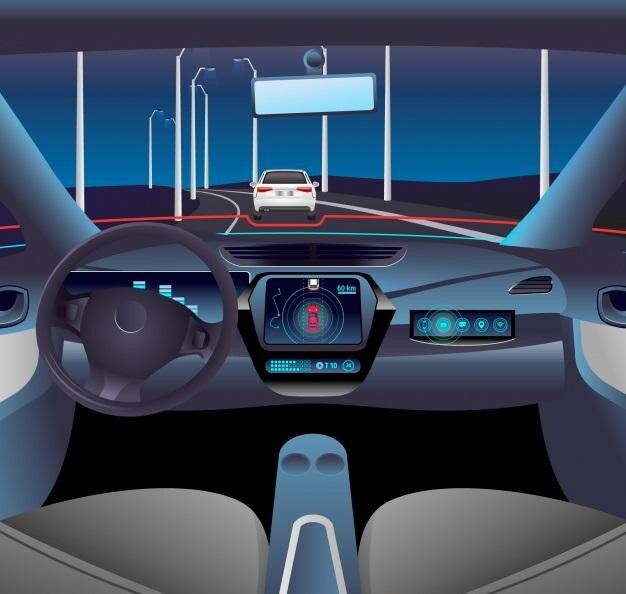
자율주행 자동차는 운전자 또는 승객의 조작없이 스스로 운행이 가능한 자동차를 의미한다. 자율주행 자동차라는 개념은 1960년대 벤츠를 중심으로 제안이 되었지만, 직접적으로 개발이 시작된 때는 1970년대이다.
미국 자동차 기술 학회에 따르면, 자율주행 기술 발전 6댠계에 따라 나뉘어져 있다. 자율주행 기술 발전 단계는 아래와 같다.
Level 0: 자동이 아니라 운전자가 전적으로 조작하여 주행Level 1: 자동차가 조항 지원시스템 또는 가속/ 감속 지원시스템만 직접 실행, 나머지 기능은 운전자가 모두 조작하여 주행Level 2: 완전히 자동화가 되는 것이 아니라 일부만 자동화가 돼, 운전자의 편의를 도움하지만, Level 3부터는 자율주행시스템이 주행환경을 모니터링을 하기 시작한다.
Level 3: 운전조작의 모든 측면을 제어하지만, 운전자의 개입이 여전히 필요한 수준Levle 4: 주행 관련 핵심제어, 주행환경 모니터링, 비상시 대처 등은 시스템이 처리 가능. 단, 시스템이 전적으로 차량 제어를 담당하기는 무리Level5: 완전 자동화 단계이며, 시스템이 100% 주행을 담당자율주행 자동차의 관련된 기술에는 대표적으로 4가지가 있다. 첫 번째로 속도유지(Cruise control) 기능이 있다. 1990년대 자동차 회사인 윌슨필처가 처음 사용한 이후 모든 자동차에 대부분의 기능으로 자리 잡았다.
두번째로 적응속도 유지(Adaptive Cruise control)기능이 있다. 자율주행에 속한 기능으로 앞선 자동차의 속도에 따라 자체적으로 설정된 속도로 감속하는 기능으로, 1990년대 이후 대부분의 자동차 회사에서 개발 후 2010년대 초에 고급차에 추가옵션으로 추가되고, 2015년부터는 모든 자동차에 기본 옵션으로 자리 잡았다.
세번째로 차로유지(Lane Keep)기능이 있다. 차로유지기능은 아래와 같이 3단계로 나뉘어 진다.
1단계: 차로 유지 경고(LaneDeparture Warning)2단계: 차로유지 보조(Lane Keep Assist)3단계: 차로 중앙보조(Lane Centering Assist)그리고, 마지막으로 차선 변경(Lane Change) 기능이 있다. 차선 변경 기능은 아래 4단계로 나뉘어진다.
1단계: 차선을 변경하나 다른차가 있는지는 운전자가 스스로 확인 해야 함2단계: 운전자가 지시할 때, 다른 자동차의 유무를 스스로 확인한 뒤 차선 변경3단계: 고속도로 또는 자동차 전용 도로에서 차선 변경 여부 스스로 판단4단계: 시내 일반 도로에서 차선 변경을 스스로 하는 단계 를(3단계보다 예외상황이 많다는 시내 일반주행으로 확장되는 단계를 말한다.)
자율주행 자동차의 안전성
그렇다면, 현재까지 등장한 자율주행 차량은 진짜 안전할까? 우선, 웨이모는 자율주행보다 인간이 직접 운전하는 것이 더 위험하다고 보고있다. 교통사고 주요 발생 원인을 보면 전방주시태만, 안전수칙 미준수, 음주/졸음운전, 무단횡단 등 인간의 과실이 태반 이다. 또한, "자율주행이 인간보다 더 정확한 상황판단을 담보한다"고 주장한다. 하지만 보안의 취약점이 생긴다면, 동시다발적으로 여러사고를일으킬 수 있다.
그렇기 때문에 보안의 취약점을 바로 잡기 위해 다양한 자동차 회사에서 기술을 개발 하고 있다. 먼 미래에는 자율주행자동차가 사람이 운전했을때보다 사고가 덜 생기고, 안전한 교통생활을 만들지 않을까라는 생각을 한다. 그렇기 위해서는 다양한 자동차회사에서 기술을 안전하고, 편리하게 만드는 것이 중요하다고 생각한다. 먼 미래에는 바쁜 사회속에서 사람들이 자동차에서도 일처리가 가능하게 되어, 사람들의 편리성을 조금 극대화 시켜주지 않을까라는 생각이 든다.
[저작권자ⓒ CWN(CHANGE WITH NEWS). 무단전재-재배포 금지]





![[구혜영 칼럼] 사회복지교육은 미래복지의 나침반이 되어야](/news/data/2026/01/16/p1065596364370517_157_h.png)





