












로봇을 어린 시절의 장난감으로만 보던 시대는 갔다. 기술의 발전과 함께 의료 수술용 로봇부터 코딩 교육용 로봇, 국가대표급 실력을 지닌 컬링 로봇까지 우리의 상상을 뛰어넘는 다양한 로봇들이 세계 곳곳에서 공개되고 있다. 지금도 전 세계 여러 곳에서 새로운 로봇 제작을 위한 연구에 몰두 중이다.
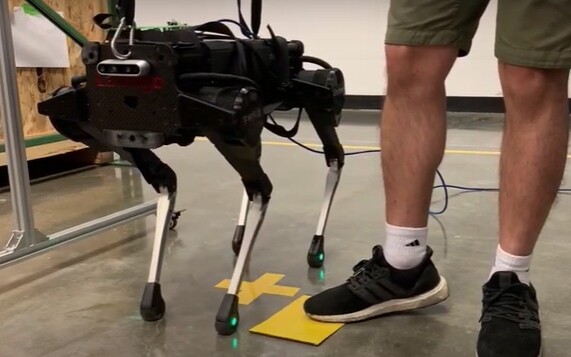
글로벌 컴퓨터 게임 기업 엔비디아도 로봇 연구에 뛰어들었다. 그 덕분에 최근, 엔비디아는 캘리포니아공과대학과 텍사스대학교 오스틴 캠퍼스, 토론토대학교 벡터 연구소 소속 연구팀과 함께 인공지능 연구원들이 사족 보행 로봇을 제어할 수 있는 프레임워크를 제작했다.
엔비디아의 사족 보행 로봇 연구
미국 IT 매체 벤처비트는 엔비디아가 기존의 로봇 다리 제어 모델보다 더욱 효율적이고, 광범위하게 적용이 가능한 사족 보행 로봇 제어 프레임워크를 개발했다고 보도했다.
엔비디아가 새로 선보인 프레임워크에는 하위 수준의 컨트롤러를 통한 러닝으로 기능이 강화된 상위 수준의 컨트롤러가 결합됐다.
연구진은 논문을 통해 "하위 수준 컨트롤러와 상위 수준 컨트롤러를 함께 활용한 덕분에 에너지 소모 측면에서 보다 효율적인 컨트롤러를 제작할 수 있었다"라고 밝혔다.
또, 해당 논문에 따르면, 이번에 공개된 프레임워크는 기존의 로봇 제어 모델보다 에너지 효율성이 최대 85% 향상됐다. 로봇 제어를 위해 상위 수준 컨트롤러에 여러 개의 층으로 이루어진 소형 신경 네트워크만 필요하기 때문이다. 이 덕분에 막대한 비용이 소요되는 모델 예측 제어 전략이 없이도 로봇을 제어할 수 있게 됐다.
로봇 프레임워크 훈련 방식은?
연구진은 실시간으로 로봇 제어 프레임워크를 강화하기 위해 바나나 껍질처럼 매끄러운 표면, 스케이트보드 탑승, 다리 건너기 과정 등을 통해 로봇을 훈련시킬 수 있는 시스템을 개발했다. 독립적으로 속도를 변경할 수 있는 러닝머신에서의 시뮬레이션 훈련도 함께 진행했다.
엔비디아가 새로 개발한 사족 보행 로봇 제어 프레임워크는 아래 영상을 통해 만나볼 수 있다.
[저작권자ⓒ CWN(CHANGE WITH NEWS). 무단전재-재배포 금지]